为实现无交通事故的安全无忧的移动出行,我们提供诸如环境识别传感技术以及车况实时监测电控技术等自动驾驶、先进驾驶辅助系统,致力于在舒适自动驾驶领域创造新价值。

立体视觉相机是一种通过对左右图像进行立体处理,可以即时检测多个立体物大小、位置和速度的三维外部识别传感器。它能够准确探测诸如白线和黄线等车道的差异、坠落物体和不平路面,是先进驾驶辅助系统的关键组件,仅此传感器就有助于实现缓解碰撞制动和车距控制。
毫米波雷达是向周围区域发射并接收从周围障碍物反射的毫米电磁波,并通过信号处理来探测障碍物距离、方向和速度的传感器。
探测结果可用于搭建一个可能与周围障碍物发生碰撞时的报警系统,并有助于通过与立体视觉相机的协调,进一步增强先进驾驶辅助系统的功能。

先进驾驶辅助系统(ADAS)控制单元搭载高性能CPU和CAN、LIN、以太网等多个通信接口,可以同时处理来自车辆传感器和相机的信息和控制算法。作为一个独立的单元,它有助于驾驶辅助和预防安全功能的扩展和采用。
ADAS: Advanced Driver Assistance Systems
ECU: Electronic Control Unit

AD ECU在搭载ADAS-ECU使用的控制CPU的同时,还增配了一个用于处理图像和各种通信大容量数据的高性能CPU,从而可以独立完成车辆传感器信号、数据融合和控制算法的处理。
CAN、以太网和LIN通信端口可实现信息输入、输出以及与其他组件的交互控制。
AD: Autonomous Driving
ECU: Electronic Control Unit

网关单元可以管理和优化车辆网络,还可以通过连接外部网络使用智能手机提供紧急支持和操作。CAN通信配置了世界最多的16通道,以实现与各种电子设备的连接。兼容信息通信的外部信号和车载LAN内部信号。无螺栓外壳结构使装置更为小巧轻便。
CGW: Central Gateway

地图定位单元运用卫星定位和惯性导航等手段,通过高精度计算确定车辆位置,同时向自动驾驶ECU和ADAS ECU输出车辆周围的地图信息,推荐以车道单位到达目的地的路线信息来支持车辆综合控制。此外,还实现了利用无线通信的OTA自动地图更新。
MPU: Map Positioning Unit

OTA (Over The Air) 控制单元以无线通信方式运用网络,更新车辆搭载电控单元的软件。除了拥有保证软件切实更新的恢复功能外,还需具备对更新软件进行加密和签名验证的功能,以减少软件泄漏和未授权重写等安全风险,从而确保高度可靠的软件更新。
日立安斯泰莫利用无线OTA开发了各种车用控制软件更新技术,提供从OTA中心发布、到车载CGW及控制ECU的系统通讯方案。
同时,我们还分析从汽车收集的视频图像和车辆数据、提供提升自动驾驶功能和质量的解决方案。
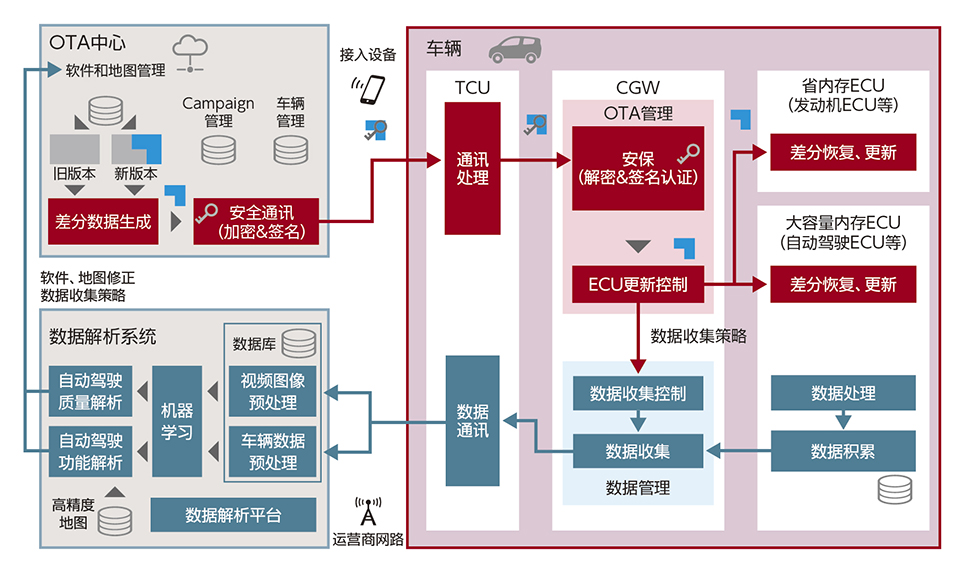
OTA:Over-the-Air
CGW:Central Gateway
ECU:Electronic Control Unit
TCU:Telematics Control Unit

