Dynamics Planning Technology
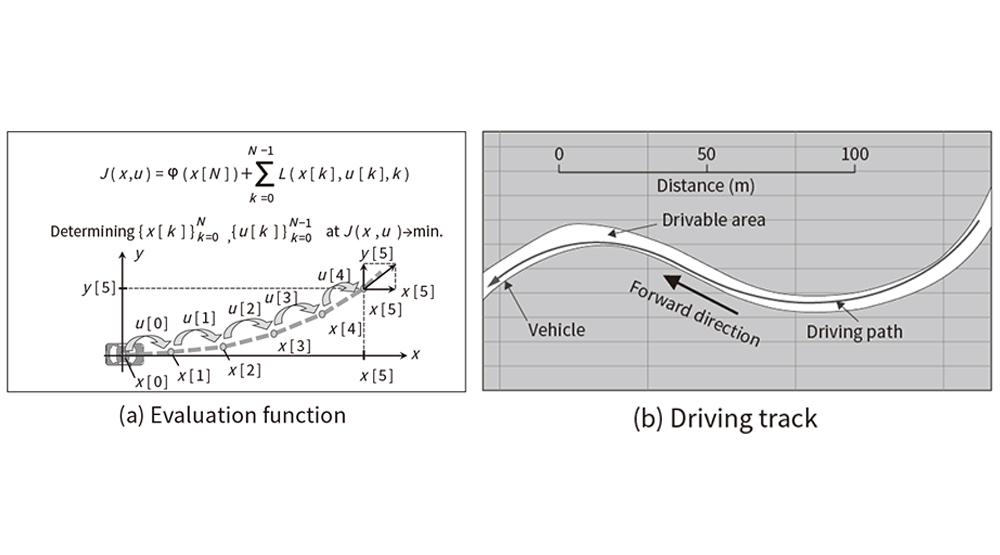
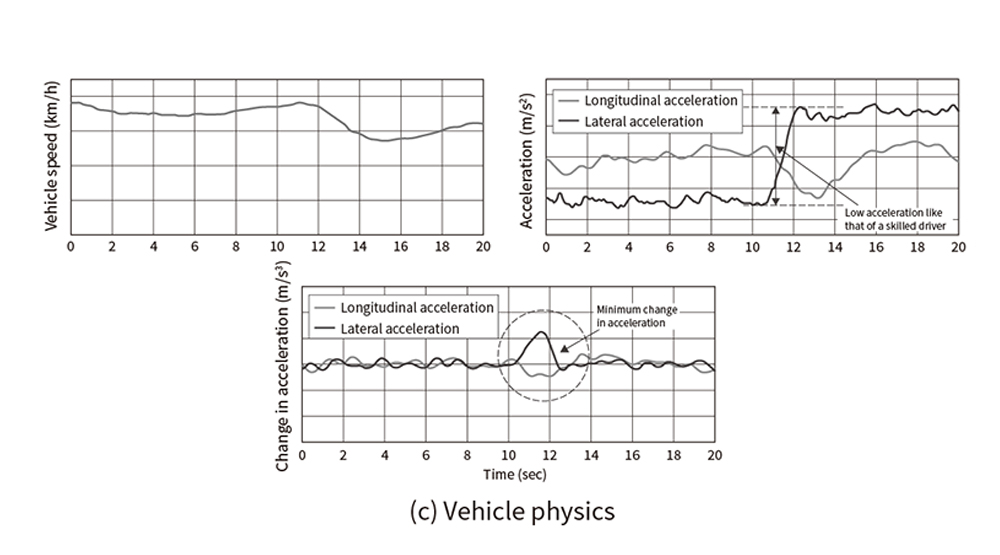
In the development of autonomous driving technology, it is necessary to build a system that can safely drive a vehicle to its destination. At the same time, as the level of autonomous driving increases, the driver will be freed from the task of driving and will be able to spend time in a variety of other ways, making the comfort of the cabin a particularly important factor. For example, a skilled driver will do this by making full use of the available lane width when cornering, controlling the speed appropriately based on the corner radius and speed of entry, and minimizing both lateral and longitudinal accelerations and changes in acceleration. In most current ADAS, however, the vehicle travels at a constant speed and stays in the center of the lane. This causes differences in lateral acceleration as well as large changes in overall acceleration, with the potential to adversely affect cabin comfort and cause motion sickness.
Dynamics planning, which is being developed by Hitachi, is an algorithm for achieving a level of ride comfort equivalent to that of a skilled driver when using autonomous driving and ADAS.
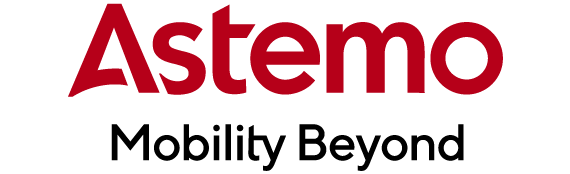
Dynamics planning uses the drivable area in front of the vehicle as an input. This drivable area is obtained from cameras and other external environment sensors, map information, and, in the future, from traffic information via the infrastructure. Dynamics planning makes effective use of the width of the drivable area and plots a path that minimizes the acceleration and changes in acceleration applied to the vehicle by following as smooth a curve as possible. Likewise, the speed is determined to keep acceleration small and gradual.
Among the issues with conventional methods for path planning are the high computing power required for complex calculations based on vehicle characteristics such as vehicle weight and length, and the risk that unexpected disturbances such as a strong wind or uneven road surface will interfere with ride comfort. Dynamics planning resolves these issues and simplifies path planning by using Hitachi's proprietary vehicle control technology to account for the vehicle characteristics and disturbance factors.
Using this system enables an autonomous vehicle to corner smoothly at an appropriate speed, just like a skilled driver, maintaining ride comfort by minimizing both lateral and longitudinal accelerations and changes in acceleration (see Figure 2).
Join us at Hitachi Astemo!