

より安全で快適なドライブを、
道路空間データと走行データでサポートします。
地図データをはじめ、インフラセンサ、カメラなどさまざまなデータを組み合わせることで、起こり得る危険をより速く検知し、回避することを可能にします。また走行の経験知を積み上げることで、よりスムーズで安全、快適なドライブを実現します。
使いたい機能や用途に応じた地図データを提供します。
DGMのコンセプト
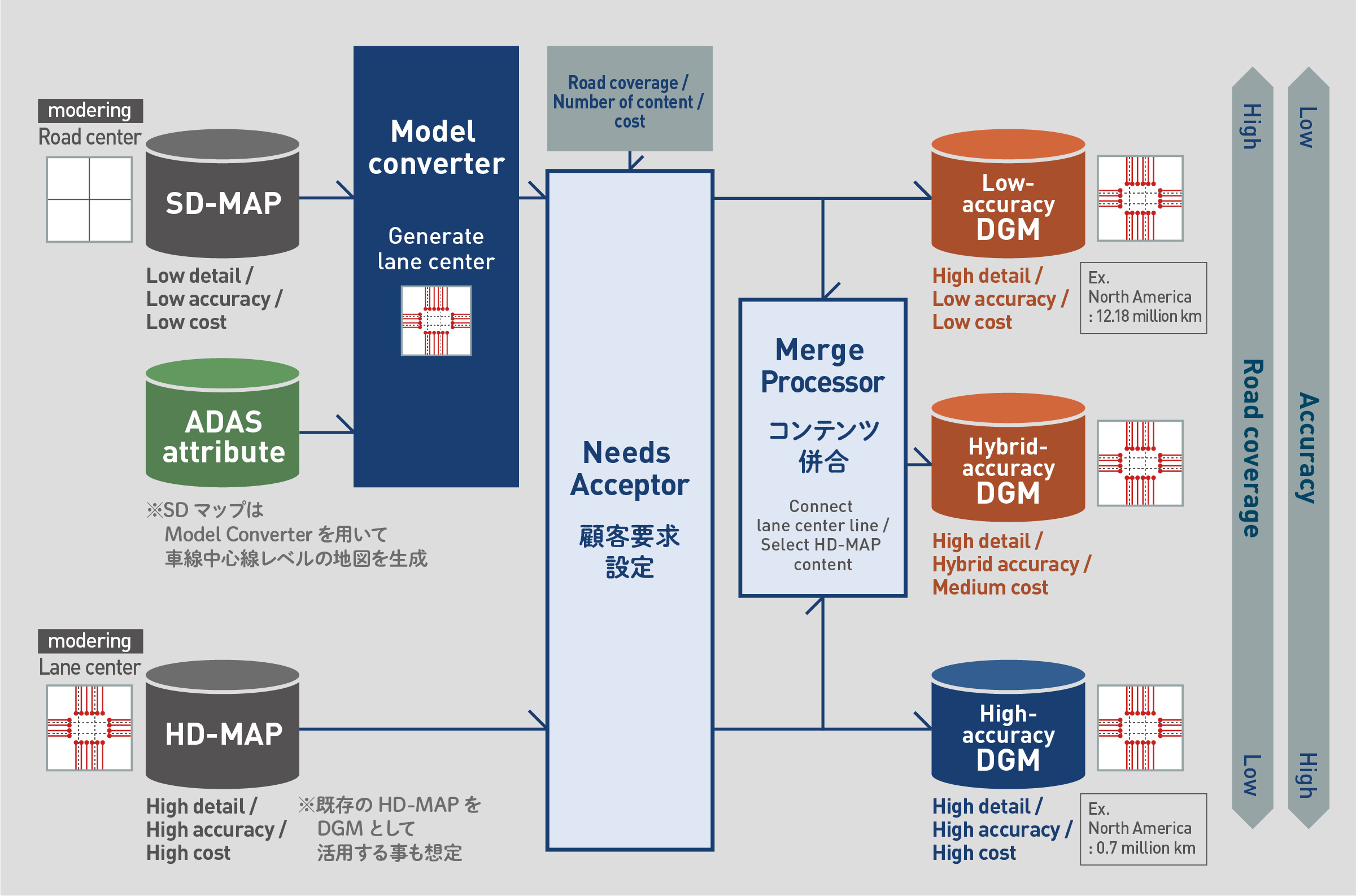
SD-MAP:Standard MAP HD-MAP:High Definition MAP
ナビ用の地図から、HDマップと同様なモデリングの自動運転用の高詳細地図作製が可能に
広く普及しているナビ用の地図(SDマップ)を活用し、Model Converterを用いて車線中心線レベルの地図を生成、高詳細地図を提供できるDGM (Detailed Geometry Map)生成技術。早く、低コストで広範囲に作成でき、高速道路はHDマップ、それ以外はSDマップで、といった組合せの自由度も高いのが特長です。センサ類との組合せも可能で、自動車メーカーのポリシーや戦略に応じて柔軟にカスタマイズすることができます。
ADDのコンセプト
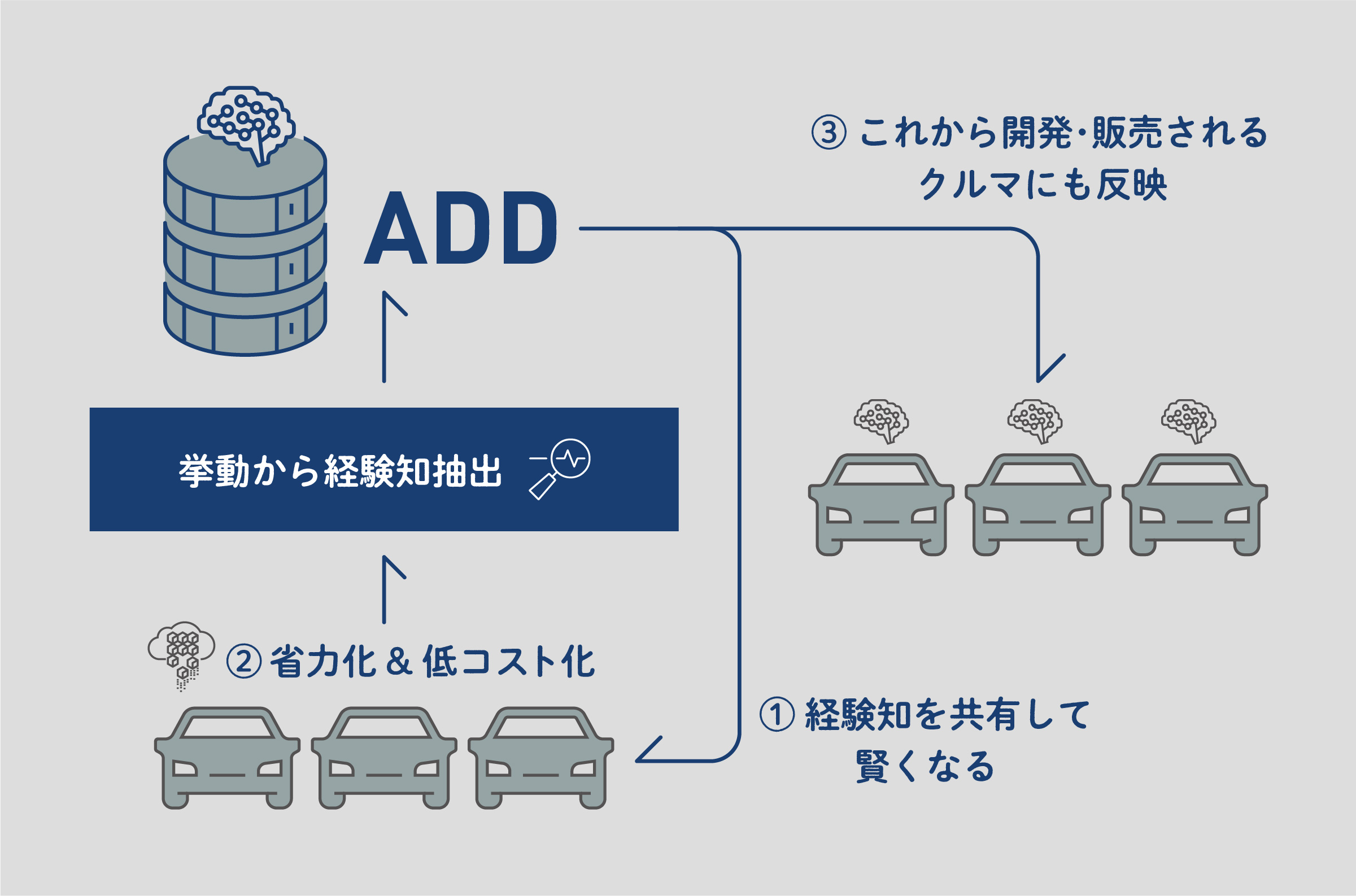
ADD:Autonomous Driving experience Database
 ①走るほどに車が経験知を積んで
①走るほどに車が経験知を積んで
どんどん賢くなり安心感もアップ
ADD(Autonomous Driving experience Database:自動運転用の経験データベース)によって、走れば走るほど車が経験知を積んでいくため、新車時点に比べて自動運転の作動領域を広げ、安全性を高めることが可能に。またドライバーやその地域特有の走り方を自動運転車両にインプットしていくので、乗る人の安心感も高められます。
 ②クラウドの利用で、必要最低限の
②クラウドの利用で、必要最低限の
アップロードで済み省力&低コスト化
クラウド側でADDを生成するため、それを複数車両で共有でき、必要なセンサープローブ等は、車両側でエッジ処理することが可能です。これによって必要最小限のアップロードで済み、OTAの通信帯域やコスト、サーバ側のストレージを省力化できます。
 ③今後開発・販売される車にも、
③今後開発・販売される車にも、
走行の経験値を反映。最初から賢い一台に
新車設計にADD を反映させることで、生産時からより賢い自動運転車両をつくり出し、販売することが可能です。